Introduction to Microinjection

Microinjection Applications
May 15, 2022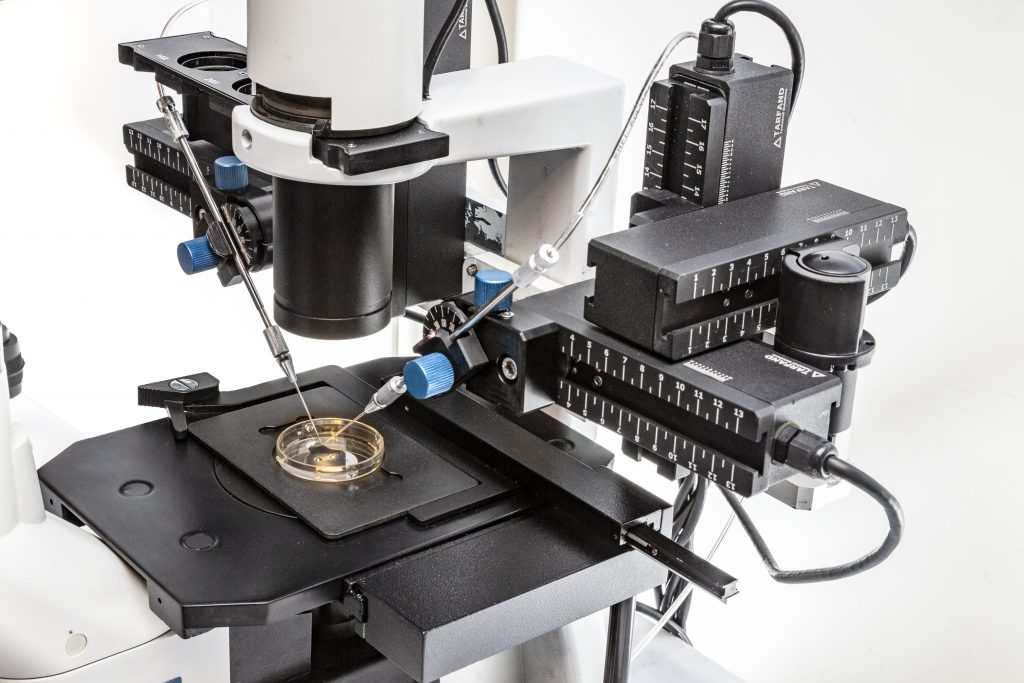
Microscope
Inverted microscopes are generally used for microinjection applications. The working distance of the condenser, measured from the lowest part of the condenser to the stage, is very important. A long or ultra-long working distance enables the micromanipulator access to head stages with unhindered movement.
Stage attachments, like moving stages, specimen holders and heating/warming inserts, are potential sources of conflict with micromanipulator motors and so should be positioned carefully. The addition of a camera or TV monitor should also be taken into consideration as possible obstruction, however their inclusion may essential depending on what application the system is required for (e.g. teaching purposes).
Micromanipulators
The micromanipulator – also known as the micropositioning device – must be firmly mounted to the microscope using a suitable adapter which can be obtained separately. The stability of the micromanipulator positioning is extremely vital and actually governs the success of the entire application. Good stability can be achieved by mounting the micromanipulator on a large footprint, with minimal overhang between the microscope mounting and the pipette holder clamp.
The micromanipulator is used to place the micropipette in certain immediacy to the target tissue. Some micromanipulators, such as the XenoWorks micromanipulator, are electronic. Such systems are highly advantageous as the software can automatically sense the position of the micropipette and is therefore able to move to any pre-determined spatial coordinate within the system’s range, achieving maximal accuracy even with the smallest of movements.
Microinjector
The microinjector maintains the pressure level inside the micropipette. No one pressure is ideal for every application – many different pressures may be needed depending upon the specific system use. For example, microinjection of fluids (like nucleic acid solutions or dyes and drug compounds) requires a lot of pressure to force the solution out of the very small tip, which usually has a diameter of less than one micron.
At any point when injection pressure is not being applied, a continuous positive “’base’ pressure should be applied to the tip. This prevents any of the medium from being drawn from the injection chamber up into the micropipette, thus diluting the solution. In Sutter’s XenoWorks, injection and base pressures in the digital microinjector can be controlled independently.
In addition to variable pressure, this injection system can also be set to distribute pressure pulses at specifically defined times, typically in the order of tens of milliseconds. This means that highly precise injections can be carried out from one target to the next with the simple press of a switch. Furthermore, any required pressure can be maintained continuously with XenoWorks by depressing the footswitch control.
Cellular Manipulation and Reconstruction
Relative to those used for direct pressure microinjection, micropipettes with a much wider tip are required for transfer and insertion of cellular components. A significantly narrower range of positive and negative pressures must be used for this process, and with this, more control must be exerted over the pressures applied. These limited pressure ranges are typically controlled using a micropipette holder linked by narrow-gauge tubing to a syringe whose plunger is connected to a micrometer leadscrew.
Turning the screw consequently changes the volume of the syringe, and hence enables precise pressure control in the micropipette. More modern systems utilize a hydraulic fluid instead of air in the syringe and tubing, creating an even superior level of control.


{kind=link}